|
|
重磅 | 理工雷科77GHz毫米波雷达亮相于百度AI开发者大会
2018百度AI开发者大会(BaiduCreate2018)于2018年7月4日至5日在中国北京国家会议中心举行。本界大会的热门话题依然是自动驾驶。百度创始人、董事长兼首席执行官李彦宏一开始就公布了Apollo无人驾驶汽车项目的最新进展,正式宣布全球首款L4级别自动驾驶巴士“阿波龙”正式量产下线。 
7月5日下午,在本次“BaiduCreate2018”百度AI开发者大会硬件开发平台公开课上,北京理工雷科电子信息技术有限公司总经理助理姚迪博士以《先进雷达传感器与智能驾驶》为题进行发言,首次对外公开介绍了自主研发的用于无人驾驶和ADAS系统的77GHz毫米波汽车防撞雷达,并与大家分享了雷达与导航技术在智慧交通中的应用。
 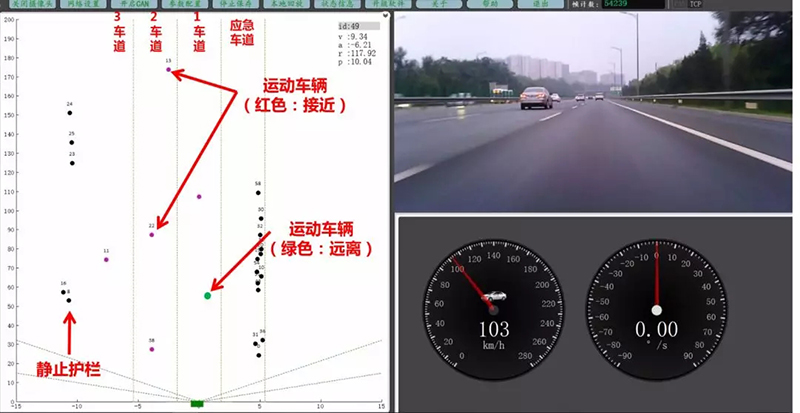 公开课上,姚迪博士还展示了理工雷科毫米波防撞雷达在公路、隧道等各种复杂条件路试实验的视频和相关测试结果,并表示可以根据用户需求,深层次开放底层数据给开发者,支持多传感器的数据融合工作。  针对智能驾驶,姚迪博士还指出,智能驾驶不只是智能驾驶车辆的对周边环境的自动感知,还包括道路本身也需要为智能驾驶车辆提供各类有用信息,实现车路协同,保证智能驾驶汽车的安全行驶。理工雷科针对该需求,提出了道面异物监测雷达、边坡监测雷达以及隧道信号增加系统解决方案。 其中,道面监视雷达采用毫米波雷达技术,对道面存着的遗撒物全天时、全天候、全自动的高分辨率扫描和监视,并将发现的异物及时上报处置,让周边智能驾驶车辆及时规避。 高速公路边坡监视雷达采用新型地基干涉合成孔径雷达(SAR)技术,能够以亚毫米级(0.1mm)精度、远距离的对大范围危险边坡实现精确形变测量,不受雨雪、烟雾、灰尘的干扰影响,并对滑坡灾害进行24h连续实时监测预警预报,通过车联网发布给周边的智能驾驶汽车进行规避。 卫星导航隧道增强系统,实现了隧道内导航信号无缝全覆盖,解决了在隧道监控“盲区”内车载卫星定位装置无法正常工作的问题,实时获取车辆位置,为智能驾驶提供保障。
最后,姚迪博士表示:理工雷科作为雷科防务的全资子公司,积极响应军民两用的号召,早在多年前就将智能驾驶和车联网领域作为一个战略发展方向。理工雷科作为一家产、学、研一体的高科技研发性公司,将扎根雷达领域,积极推动和助力智能驾驶行业的发展。
|